



Welcome to CANVAS
Configure Connected and Autonomous Networked Vehicles for Active Safety
Imagine a transportation system in which vehicles can assess the wellbeing of their occupants; communicate with one another, their environment, and the infrastructure; and make real-time decisions based upon this data.
In this integrated system, autonomous and connected vehicles could sense and warn others of conditions ahead, and roadways could alert vehicles to hazardous conditions.
Traffic problems could be communicated to a central control where signals could be modified to address current conditions in real time and autonomous vehicles could be rerouted to avoid backups.
In this landscape, robust data becomes available for traffic planners, and vehicle throughput can be optimized.
By utilizing the entire canvas of sensing, networking, machine- and deep-learning, communication, security, privacy, mobility and transportation services, traffic modeling and infrastructure planning, CANVAS can create a clear picture of the interwoven systems affecting vehicles, their passengers, and the entire transportation system.
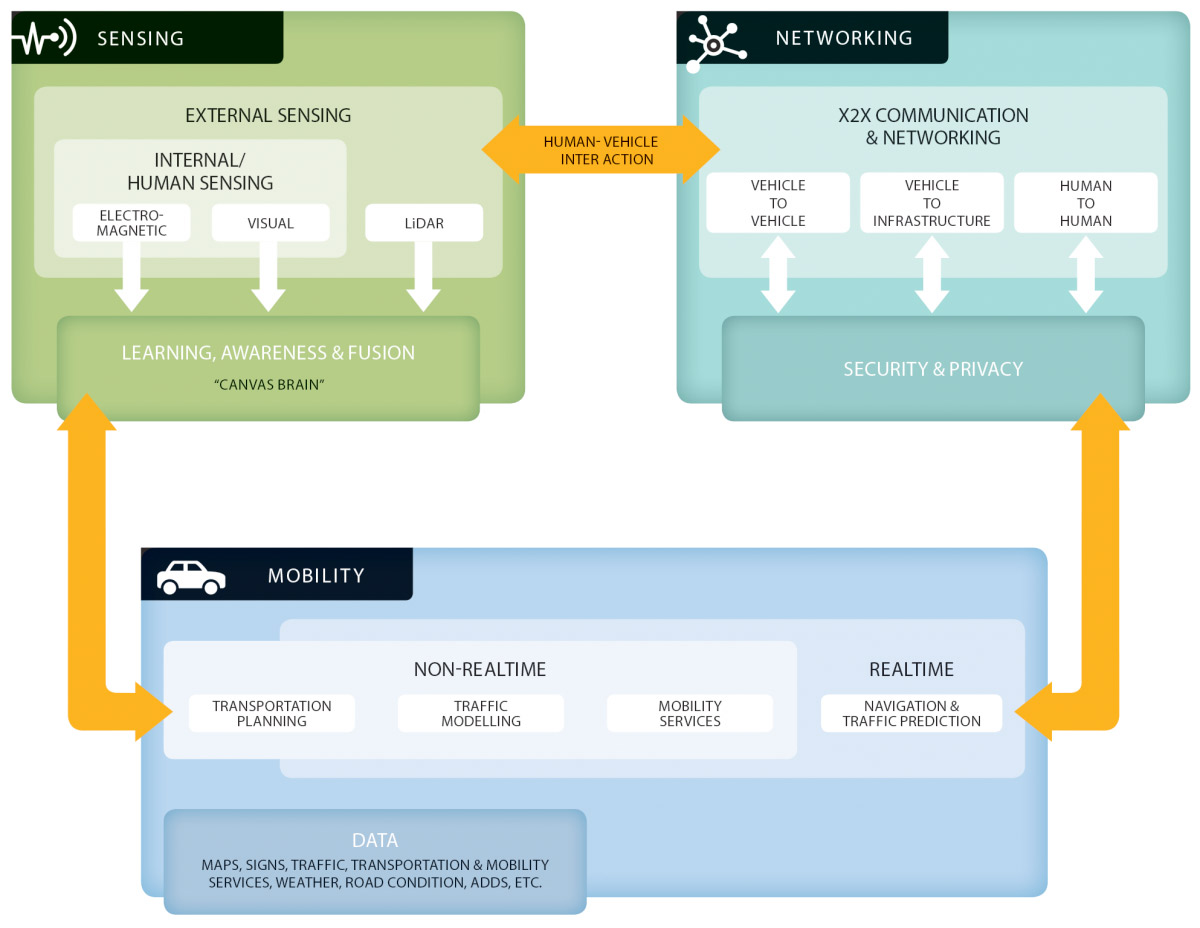
Sensing, networking, and mobility research are drawn together in CANVAS, blending active safety, security and privacy, and mobile/transportation services for connected and autonomous vehicles—and their passengers.




