CANVAS research is concentrated on several key areas, including traditional radars, laser radars (lidars), computer software, and development of artificial intelligence algorithms that allow a vehicle to maneuver in its environment.
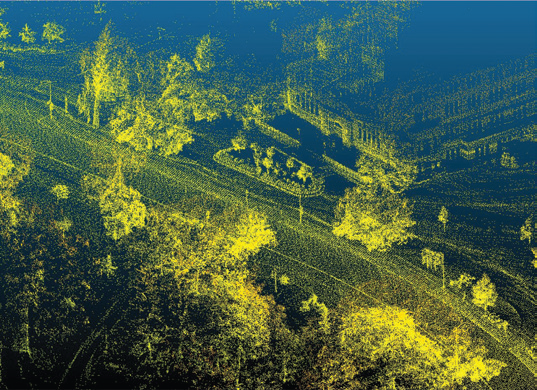
- MULTI-MODALITY SENSING
radar, LiDAR, vision, and multispectral sensing to develop a 3-D map of the area in which the car is driving, for maneuverability improvement, as well as develop advanced algorithms that will assist in navigating a particular environment
- SENSOR & DATA FUSION
communication among vehicles, infrastructure, and humans with intra- and inter-modality fusion of sensed signals and data
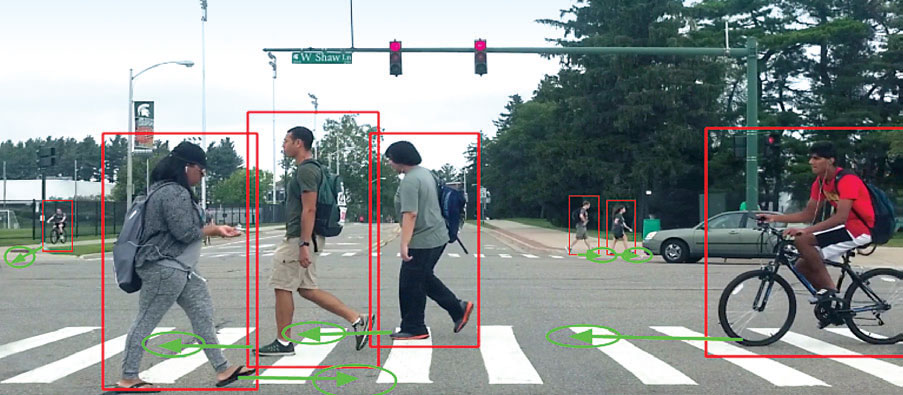
- (JOINT) DEEP LEARNING
object detection, recognition, and motion forecast using deep learning and other machine learning and artificial intelligence algorithms that allow a vehicle to maneuver in its environment, including: situational awareness, joint deep learning, localization and mapping, optimal fusion, mobility services, and data
- INTERNAL SENSING
human-vehicle interaction and human sensing, including biometrics for safety and security, as well as health and well-being, monitoring emotive and cognitive state, and estimating age of occupants